엘레호비사 제품은 옛날 국내에서도 백화점이나 쇼핑센터 등의 고급 완구등을 취급하는 곳에서 전자키트로 어렵지 않게 접할 수 있었다.
이 전자키트는 독특한 투명 돔 안에 전자회로와 구동부가 보이는 구조로 되어있는 특징이 있었다.
전자회로와 모터구동 기계부가 서로 연동해서 단순히 움직인다를 벗어나 다양한 움직임을 보인다는 것이 지적호기심을 몹시나도 자극했던지라 어렸을 적에 파는 곳에서 한참을 구경했다.

이 엘레호비에서 나온 제품들은 보통 직접 납땜을 하고, 부품을 조립해서 만들게 되어있으나, 이번에 소개할 제품은 처음부터 완성된 완제품의 형태로 발매되었다.
바로 1985년 엘레호비(ELEHOBBY)사에서 발매한 MSX용 로봇인 MOVIT2 9505 MSX WIZARD다.
이 제품을 처음 본 것은, MSX 매거진에서였다.
다음은 소개글이 실린 1985년 2월호 MSX Magazine의 기사다.

기사를 처음보고 헉!소리가 나올정도로 사진들은 인상적이었다.
당시 MSX매거진등에도 여러가지 로봇기사가 나왔지만, 대부분 조잡한 디자인(개인적 기준)이었다.
하지만 정말 깔끔 그자체였다.
엘레호비 특유의 투명 돔 구조에 살짝 보이는 전자회로,
거기에 MSX컴퓨터에서 코딩을 하면 그대로 움직인다는 획기적인 활용법까지.
너무나도 매력적이었다.
뭐, 지금에야 컴퓨터로 제어하는 장난감들이 널리고 널렸지만, 80년대에는 이야기가 달랐다. =)
그렇게 갖고싶다는 생각만하고 긴 세월이 흘렀고, 어쩌다 운이 좋아 이 녀석을 구할 수 있었다.
=)
우선 박스 사진.

MSX 컴퓨터 대응의 로봇으로 퍼스컴으로 작성한 데이터를 부속의 ROM/RAM 카트리지에 저장하고, 그 카트리지를 로봇에 장착하면, 명령대로 스스로 움직이는 시스템입니다.
부속품과 조작법 설명

위의 기사에도 산요와 함께 판매를 시작했다고 되어있는데, 실제 박스, 매뉴얼 곳곳에 산요의 흔적이 나타나있다.
예제로 사용된 컴퓨터의 그림을 보면 산요의 MSX라는 것을 금방 알 수 있다. =)
금방 알리가 없으려나? 하긴. 사실 이제와서 산요의 MSX가 어찌 생겼었는지 아는 사람이 그것도 대한민국에서 몇 명이나 있을런지는…(…….)
오라, 작은 미래인.

박스 상태가 불량한 게 보인다.
제원 등이 소개되고 있다.

가격은 12,800엔.
윗면

내용물은 다음과 같다.

사용 설명서/보증서

로봇 본체,
아아 역시 이 돔형태의 머리부분은 너무나도 매력적이다.

ROM/RAM 카트리지

엽서

고정용 스티로폼
동일한 게 2개 들어있다.
앞 뒤 모양이 달라서 2개가 서로 제품을 양쪽에서 잡아주게 디자인 되어있습니다.
배터리

듀라셀은 당시 산요에서 판매하였거나, 라이센스 했던 모양이다.
산요의 이름이 붙은 배터리가 사용된 것은 역시 위의 기사대로 산요와 관계가 있었기 때문일 것이다.
그런데, 배터리 상태가 엉망이다. 물론 35년은 묵은 배터리다보니 어쩔 수 없을 것이다.
바로 위에서 박스 상태가 불량하다고 한 원인이기도 하다.
불행하게도 이번에 구한 제품은 배터리를 꽂아놓은채 장기 보관해서 누액에 당한 녀석이었고,
무한궤도는 경화되어 돌아가지 않는 녀석이었다. =)
그럼 당연하지만, 살리기 시작.
잘 분해해서 세척할 것은 세척해준다.

우선 구동 모터는 다음과 같은 상태였다.

완전히 썩은 상태 =)

그래서 동형의 마부치 모터를 구입.

2개만 필요할터인데 왜 박스로?

모터 고정 부품도 누액으로 엉망이 되었지만, 식초를 이용해서 일단 쓸만하게 살려놓았다.
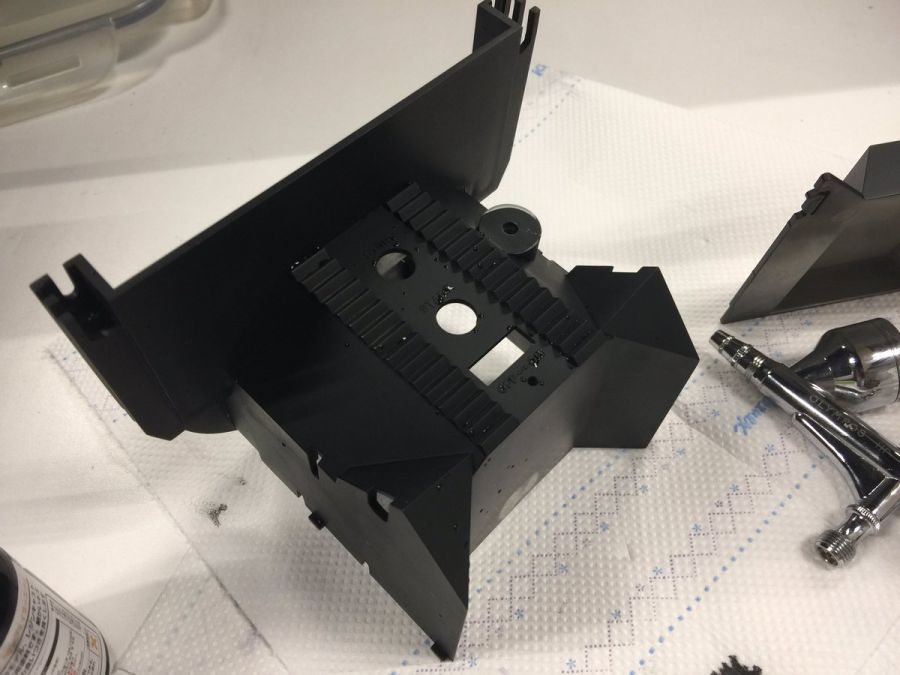
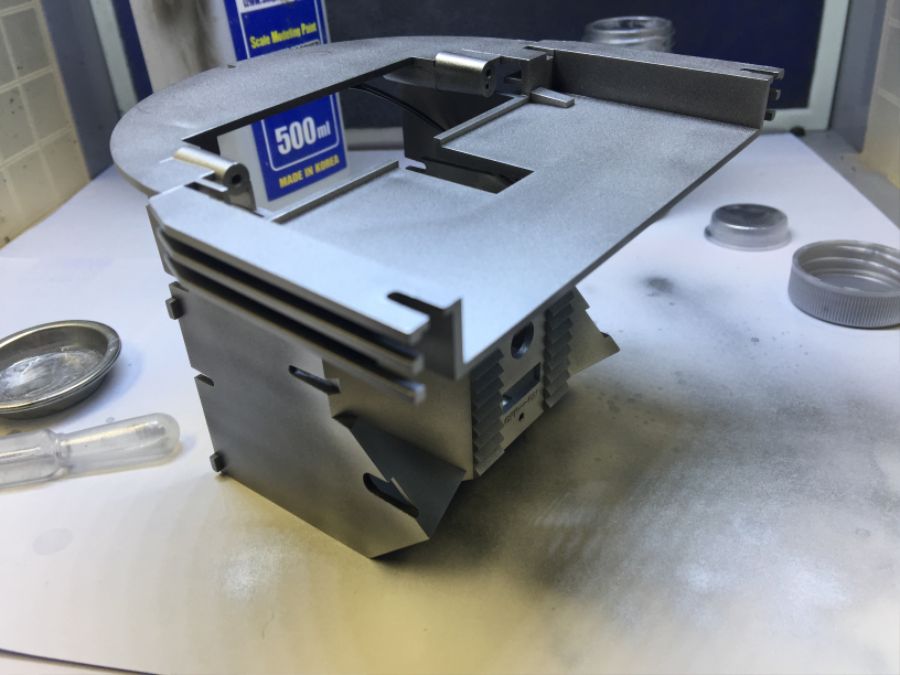
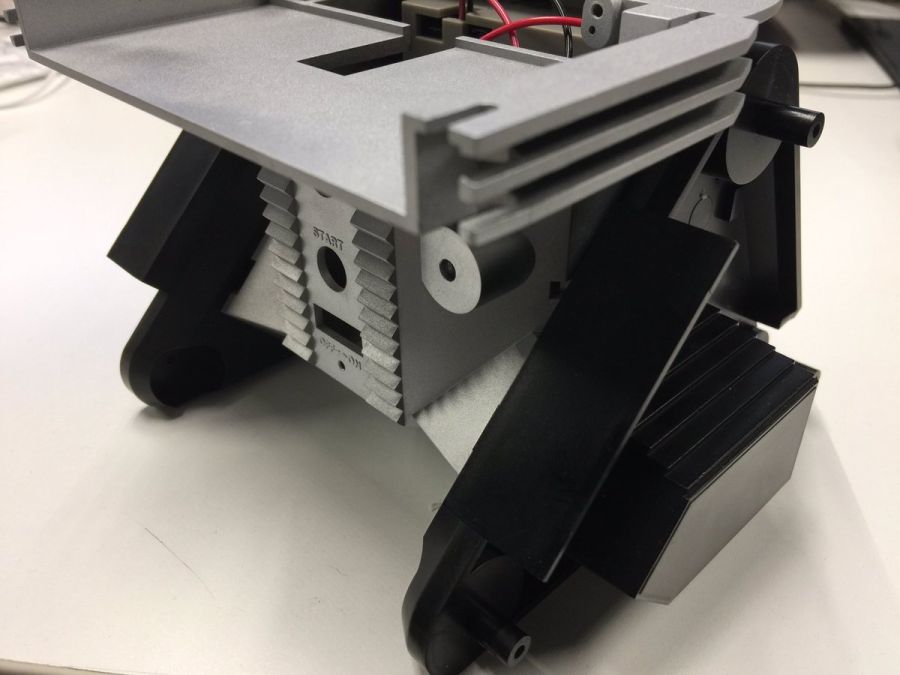
다음은 본체.

부러진 부품은 봉을 박고 잘 고정해준다.

전체적으로 누액으로 도색 상태도 엉망임을 알 수 있다.
대충 표면을 다듬은 뒤, 검은색으로 밑색을 깔아준다.
잘못된 곳은 다시 잘 다듬어 준다.


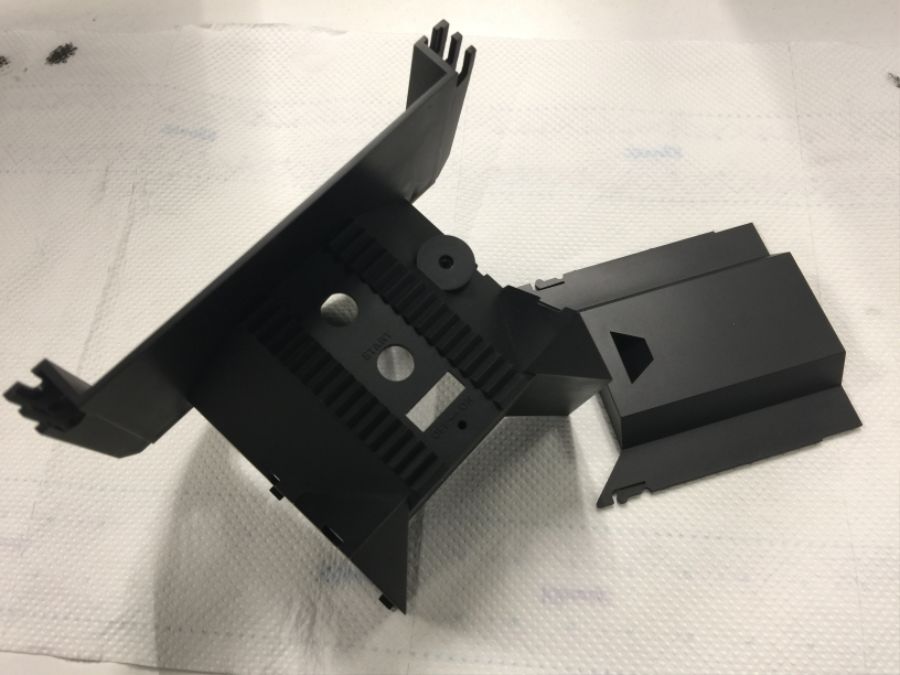
도색작업




그럴듯하게 완료. =)



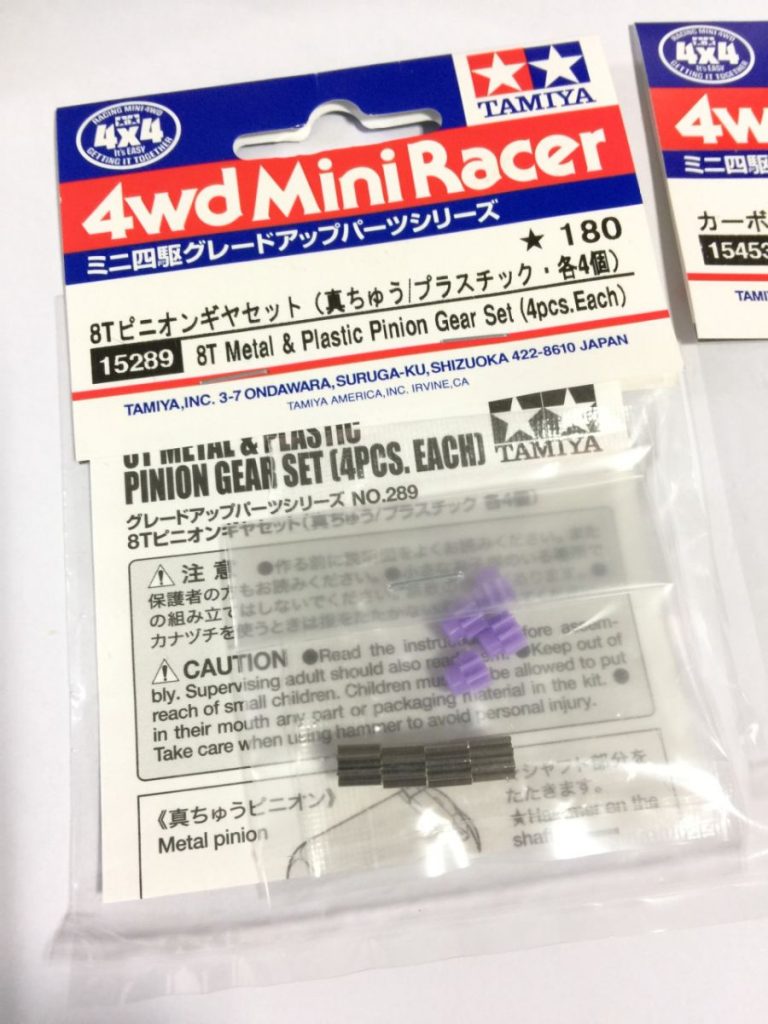
다음은 갈라진 피니언 기어를 바꿔준다.
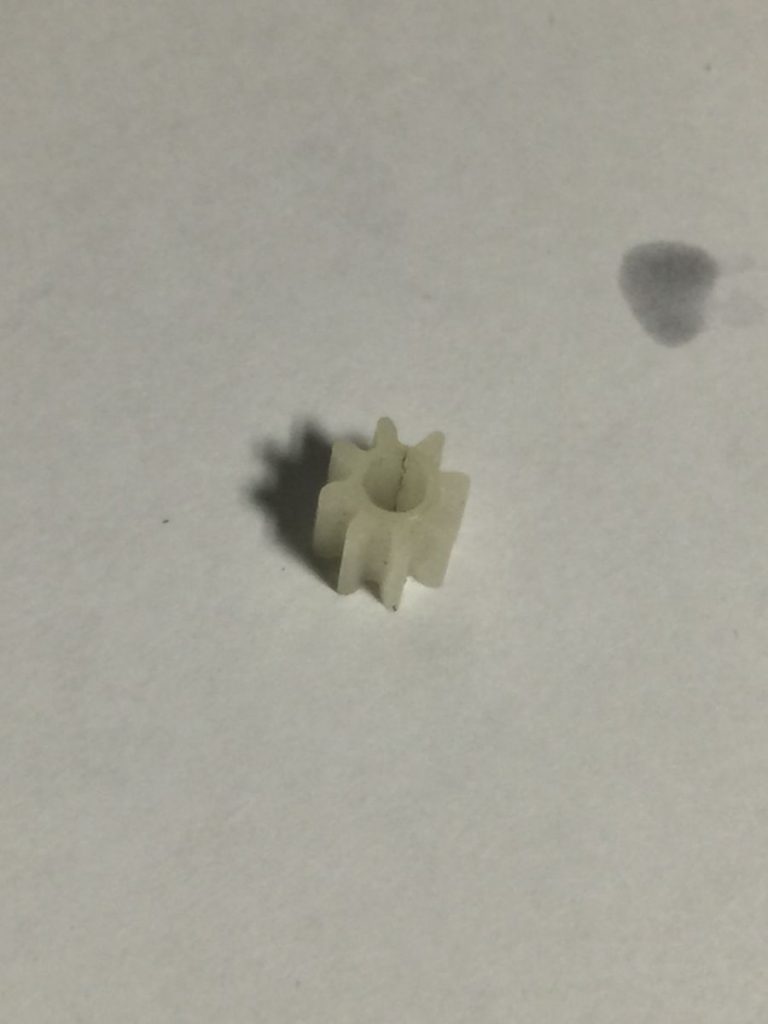
미니 4륜용 8T 기어를 사용하면 된다. =)



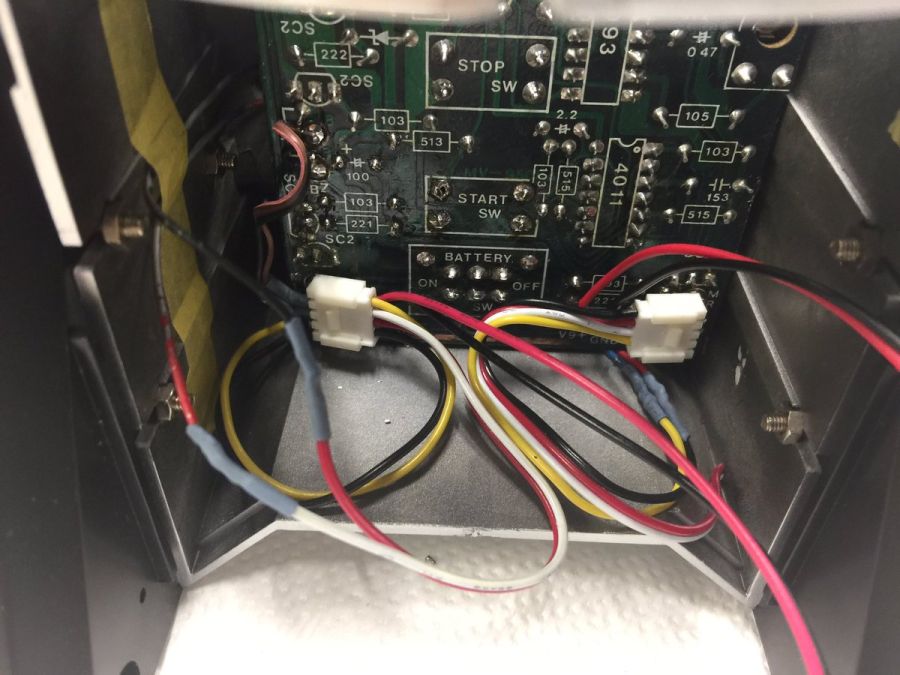
그리고 삭은 기판의 보수. 일부 칩이나 캐패시터가 불량이라 Aliexpress, eBay등을 뒤져서 교체해줬다.
부저도 갈아줬는데 액티브 부저를 사용.

보수를 편하게 하기 위해서 커넥터 처리했습니다.


뭐 이정도 부품을 구해놓으면 대략 문제 없이 고칠 수 있다. 음 이렇게 세트를 맞춰두면 두 대는 더 고칠 수 있다.

안타깝게도 무한궤도는 오른쪽 상태처럼 삼각형으로 경화되었다.
그래서 이것저것 대체품을 찾아본다.
왼쪽 녀석도 대체품으로 찾은 것인데, 강철 와이어가 들어있어서 쓸 수 없었다.

그래서 테스트용으로 미니 4륜용 바퀴를 달아준다.

(뭐, 굴러는 간다.)
그러다 몇번을 테스트하다 적절한 녀석을 찾았다.

138XL050 규격 타이밍 벨트. =) 살짝 뻑뻑한 감이 있지만, 찾아본 것 중에서 가장 완벽했다.


조립은 분해의 역순!
손상된 배터리 홀더, 커넥터도 다 새것으로 바꿔주고, 이리저리 남은 부분을 조립하면

완성.

그럼 차례는 동작.
코딩에 사용된 컴퓨터는 Panasonic MSX turboR FS-A1ST. 30년 전에 발매된 모델로 MSX의 거의 마지막 세대에 해당하는 제품이다.
(FS-A1GT라고 마지막 모델이 있지만 같은 turboR규격이다.)
MSX 시리즈는 하위 호환성이 있어서 이전에 MSX1용으로 나온 제품도 상위 기종에서 문제없이 사용할 수 있다.
(일부 예외의 경우도 있다. 나중에 기회가 되면 그런 제품도 소개하겠다)
방법은 간단. ROM/RAM 카트리지를 끼우고, 동작을 코딩한다.
그리고, 끝나면 다시 ROM/RAM카트리지를 뽑아서 로봇에 끼우고 동작 스위치를 눌러주면 끝.
(동작 사이 사이 쉬게 해줬으면 동작 구분이 확실했을텐데 찍을 땐 그 생각을 못 했다.)
음, 처음 돌려봤을 때 살짝 실망했던 것은 상상속에서의 움직임을 구현할 수 없었기 때문이었다.
DC 모터는 한 방향으로만 회전해서 양쪽 모터를 반대로 돌려 제자리에서 돌기 같은 것은 불가능하고,
또 각 동작 시간은 내부의 가변저항을 돌려서 조정하는등 섬세한 제어는 불가능했다.
그리고 동작의 타이밍도 완벽하게 고정되지 않고 들쑥날쑥한 경우도 있었다. =)
아마도 지금 다시만든다면 스테핑모터를 써서 정밀하게 각도를 제어해서 움직이게 할듯.
하지만, 80년대의 제품!
거기에다 그 시절에 그렇게 부품을 써서 판매했다면 절대 일반인 상대로 못팔지 않았을까 싶기도 하다.
뭐, 그때라면 완벽하진 않지만 이정도로도 꽤 즐거움을 줬을 것이라 생각한다. =)
그럼, 예전에 찍어놓은 영상으로 마무리.